

让机器人实现避障6种的方图文详解
进行补偿,才能实现对周围环境的探测的最佳效果。当然,这就产生了多传感器信息的融合处理的问题,增大了信息处理的工作量和难度。
那么,除了这种传感器避障方法,还有很多的其他方法融合处理多种传感器信息,让全自主机器人实现完美避障,比如人工势场法避障控制法、模糊逻辑控制避障控制法、人工神经网络避障控制法、栅格法避障控制法以及声波避障控制法等。
人工势场避障控制法,是一种最简单又新颖的做法,是另一种仿生学,仿照物理学中电势和电场力的概念,建立机器人工作空间中的虚拟势场,按照虚拟势场力方向,实现局部路径规划。
通过构造目标位姿引力场与障碍物周围斥力场共同作用的人工势场,来搜索势函数的下降方向,然后寻找无碰撞路径。
听起来很玄乎,但是早已经有应用产品了,KhaTIb曾应用于移动机器人的导航上。但是并没有正真获得大规模应用。
因为即使对于简单环境很有效,但是都是在静态的研究中得出的,而没考虑障碍物的速度和加速度的影响,所以在动态避障控制中,人工势场法避障控制不是很理想。因为在复杂的多障碍环境中,不合理的势场数学方程易产生局部极值点,导致机器人未到达目标就停止运动,或者产生振荡、摆动等现象。
另外,传统的人工势场法着眼于得到一条能够避障的可行路径,还没有研究出什么最优路径。
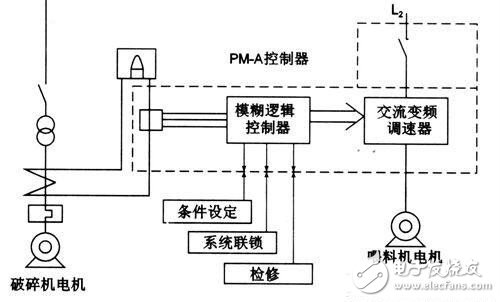
模糊逻辑控制避障法出现得并不晚,1965年美国的一位教授就提出过模糊逻辑的概念。1974年,英国伦敦大学一位教授利用模糊控制语句组成的模糊控制器控制锅炉和气轮机的运行获得成功,开始将模糊数学应用于自动控制领域,包括机器人领域。
由于不必创建可分析的环境模型,目前模糊逻辑方法在解决机器人避开障碍物问题上己经有了大量的研究工作。另一个独特优点也让用专家知识调整规则成为可能,因为规则库的每条规则具有明确的物理意义。
在模糊逻辑控制避障法中,模糊控制规则是模糊控制的核心。当前研究工作的新趋势之一是它的渐增本质,特别是在模糊控制规则的自动生成方面,即连同自动模糊数据获取,给予算法在线模糊规则学习能力,数据获取和规则生成均自动执行。
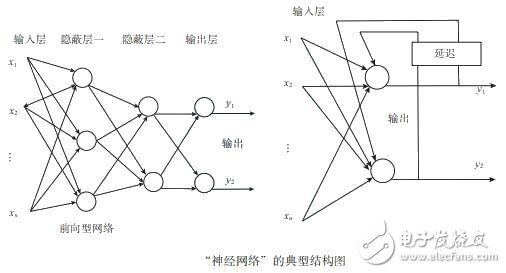
人工神经网络是由许多单元(又称神经元),按照一定的拓扑结构相互连接而成的一种具有并行计算能力的网络系统,它具有较强的非线性拟合能力和多输入多输出同时处理的能力。用在机器人上,是通过模拟人脑神经网络处理信息的方式,从另一个研究角度来获取具有人脑那样的信息处理能力。
对于智能机器人来说,采用人工神经网络进行信息融合有一个最大优势,即可大规模地并行处理和分布式信息存储,拥有非常良好的自适应、自组织性,以及很强的学习功能、联想功能和容错功能,接近人脑的信息处理模式。
这属于用启发式算法在单元中搜索安全路径。赋予每个栅格一个通行因子后,路径规划问题就变成在栅格网上寻求两个栅格节点间的最优路径问题。搜索过程多采用四叉树或八叉树表示工作空间。
栅格法以基本元素为最小栅格粒度,将地图进行栅格划分,比如基本元素位于自由区取值为0,处在障碍物区或包含障碍物区为1,直到每个区域中所包含的基本单元全为0或全为1,这样在计算机中就较容易建立一幅可用于路径规划的地图。
栅格粒度越小,障碍物的表示会越精确,也就更好避障。但往往会占用大量的储存空间,而且算法也将按指数增加。
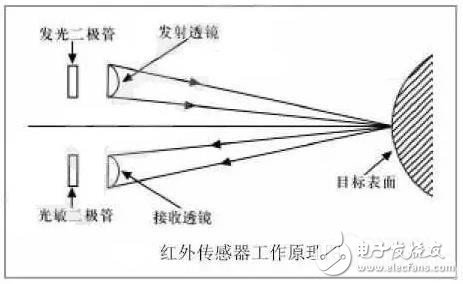
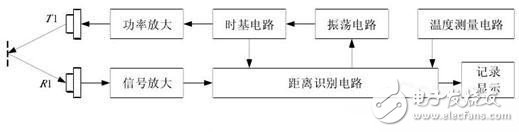
声波避障行为能够实时监测长距离超声波传感器,为机器人搜索开阔路径。当机器人离障碍物还有一定距离时,超声波传感器就能够检测到有关信息,并据此控制机器人离开。
然而,超声波传感器对非常接近的物体会探测不到,这个距离称为物理探测盲区。在刚发射信号的时候,返回信号的阈值会被设定得很高以防止发射波直接触发接收器,因此如果检测的距离很短、阈值没下降,返回信号已经到达接收器,这时接收器会认为这个返回信号是刚发出的信号从而拒绝接收,使超声波传感器形成一个探测盲区,没法对近距离物体探测。
另一个缺陷是,如果在一个比较小的转弯角度上安装有平滑的表面,该表面能够将声纳波束向前反射,而不是反射回机器人。在这种情况下,由于没回波返回,传感器就会产生一次漏报,机器人也会因此认为在自己行走的路径上没有障碍物存在。此时,声波避障行为不能得以触发,也就无法避障。
近年来,激光雷达在移动机器人导航中的应用日益增多。这主要是由于基于激光的距离测量技术具有很多优点,特别是其具有较高的精度。
激光雷达与其它距离传感器相比,能够同时考虑精度要求和速度要求,这一点非常适合于移动机器人领域。此外,激光雷达不但可以在有环境光的情况下工作,也可以在黑暗中工作,而且在黑暗中测量效果更好。不过,该传感器也有一些相应的缺点,比如安装精度要求高、价格相对较昂贵等。